







| 不同点 | PPK | RTK |
| 通讯方式 | 无需通讯,采集静态 | 实时通讯,差分数据 |
| 作业方式 | 事后解算,后期查看 | 实时数据,随时查看 |
| 作业半径 | >50km | 电台10km,网络30km |
| 卫星影响 | 不易失锁 | 易失锁 |
| 定位精度 | 平台精度2.5mm+1ppm 高程精度 5mm+1ppm | 平台精度8mm+1ppm 高程精度 15mm+1ppm |
| 定位频率 | 最大支持20Hz | 最大支持20Hz |

软件优势:
> 软件支持多架次合并解算,一个基站可以同时对应多个移动站文件,可根据具体数据自动调整配置参数,实现一键操作;
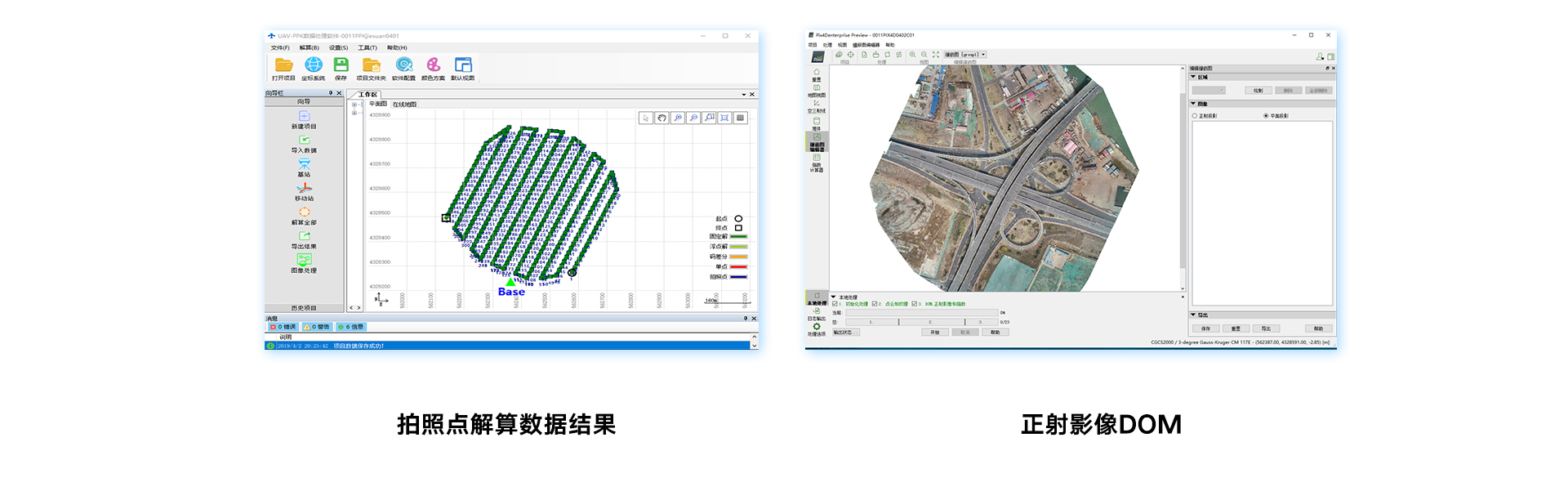
> 软件支持照片文件夹导入,解算完成后,生成pos点与照片一一匹配,同时生成可直接导入Smart3D、PIX4D、DP-Smart等主流数据处理软件的格式文件;
> 软件具有快速图像处理功能,生成的DOM、DSM文件可导入HiData、EPS等软件进行二维、三维测图操作,生成的图像处理报告可快速进行外业质量评估;
> 软件可进行矢量图操作,可以图上展点、图上刺点、图上推演、面积测量与距离测量,可用于快速救援、农林牧渔等应急场景;
飞行航高 100M 当日天气 晴 飞行速度 7M/S 飞行重叠率 80%*70% 照片比例 3:2 云台角度 -90度 畸变修正 打开 中央子午线 117度 当地坐标系 国家2000 风速 3-5级 飞行时间 16min 规划面积 0.19KM2
仪器设备:三脚架x1、基座x1、对中杆x1、Phantom 4 RTKx1、UBase地面基站x1、CORS帐号x1外业作业:UBase连接通过CORS获取基站坐标,通过测高片量取仪器斜高,以1Hz采集静态数据。Phantom 4 RTK外业飞行,获取照片、机载端数据PPKRAW.bin、拍照点时刻文件Timestamp.MRK


返回顶部


